首先,我们分析一下什么是感知机,
所谓感知机就是:假设输入空间(即特征空间)是,输出空间是,输入表示实例的特征向量,对于输入空间的点,输出表示实例的类别。由输入空间到输出空间的映射如下所示:
f(x)=sign(w⋅x+b)
其中 sign 是符号函数,w 和 b 是感知机参数。
通过定义可以发现感知机是一种线性分类模型。那么异或问题是什么呢?异或可以表示为如下形式:

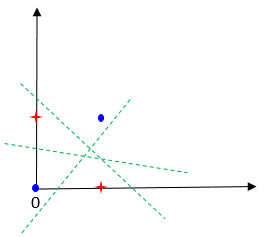
即异或问题可以分为根据输出可以分为两类,显示在二维坐标系中如上图(右)所示:其中输出结果为1对应右图中红色的十字架,输出为0对应右图中蓝色的圆圈,我们可以发现对于这种情况无法找到一条直线将两类结果分开。即感知机无法找到一个线性模型对异或问题进行划分。
其实不光感知机无法处理异或问题,所有的线性分类模型都无法处理异或分类问题。
原文:https://blog.csdn.net/yangfeisc/article/details/45486067
感知机有关的博客: